| EE4001 Projects (Academic Year 04/05) | |
|
|
Adaptive type-2 fuzzy controller |
|
|
Design and implementation of an ultra-low noise sensor readout circuit for a micro capacitive pressure sensor |
|
|
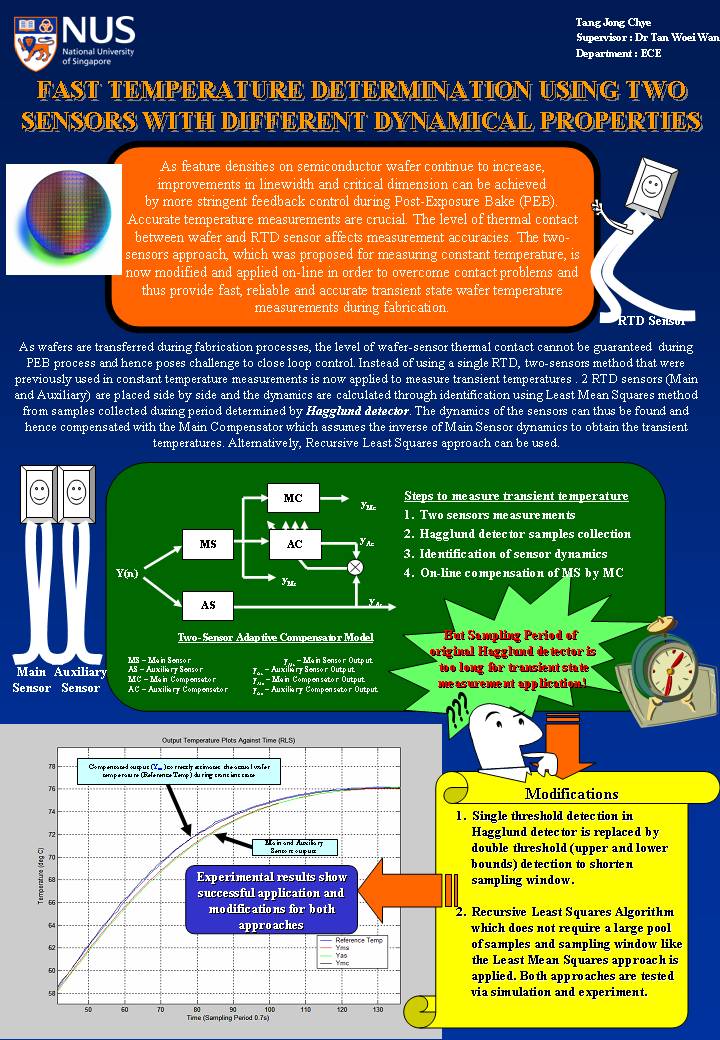
Embedded two-sensors temperature measurement system |
|
|
Genetic evolution of Type-2 Fuzzy Controllers |
|
|
Fuzzy control of MEMS gyroscopes |
| Adaptive type-2 fuzzy controller | |
| Danesh Jamal Kamal | |
|
Membership functions of standard (type-1) fuzzy sets are usually represented by the Guassian function. The mean and standard deviation of the Guassian function are frequently determined by 'learning' algorithms. One example is the Adaptive Network Based Fuzzy Inferencing System (ANFIS), which has successfully been applied to a variety of applications. Recently, there is more and more interest in type-2 fuzzy sets because they present a better representation of the 'fuzziness'. Type-2 fuzzy logic systems also provide better modelling accuracy with a smaller rule base. In view of the advantages offered by type-2 fuzzy sets, this project seeks to extend the learning algorithms for adapting a type-1 fuzzy controller to its type-2 counterpart. |
|
| Design and implementation of an ultra-low noise sensor readout circuit for a micro capacitive pressure sensor | |
| Low Shu Ling Emileen | |
|
Various methodologies
are applied to the measurement of pressure. Among them, the
capacitive pressure sensor is one of the most useful devices due
to its high performance-to-price ratio, reliability and low
power consumption. A typical capacitive pressure sensor element
consists of two conductive plates with a vacuum between them.
The plates are insulated from each other and behave like an
electrical capacitor. An external fluid or gas pressure deflects
the upper plate so that the capacitance of the element varies
with pressure. This change in capacitance can be detected by a
suitable electrical circuit. However, due to the need to resolve
small sense capacitances, typically between 50fF to 1pF,
capacitance meters may not be able to measure the capacitance of
a micro capacitive pressure sensor. The main objective of the
project is then to design and implement an ultra-low noise
sensor readout circuit for a micro capacitive pressure sensor.
|
|
| Embedded two-sensors temperature measurement system | |
| Chan Chee Hoe | |
|
In the semiconductor manufacturing industry, wafers undergo numerous thermal processing steps e.g. soft bake, hard bake, post-exposure bake and rapid thermal processing. The desire to print smaller features on larger substrates has necessitated more stringent wafer temperature control. It is becoming increasingly difficult to meet the tighter specifications using open loop control methodology, which is the current practice in the semiconductor manufactuirng industry. Consequently, there is a need to develop in-situ wafer temperature metrology in order to provide a feedback signal for performing closed-loop control. A problem hindering the wide-spread use of in-situ temperature measurement systems is that the accuracy of the measurement is highly dependent on the level of thermal contact between sensor and wafer. Estimation algorithms provide a means of overcoming the influence of varying contact level on the accuracy of a temperature measurement system. This project seeks to develop an embedded system that achieves accurate in-situ temperature measurement by using the output of two sensors to estimate the actual temperature. |
|
| Genetic evolution of type-2 fuzzy controllers | |
| Boo Hang Boon | |
|
Fuzzy systems have demonstrated their ability to solve different kinds of problems in various application domains. Currently, there is an interest in augmenting fuzzy systems with learning and adaptation capabilities. Two of the most successful approaches to hybridise fuzzy systems with learning and adaptation methods have been made in the realm of soft computing. Neural fuzzy systems and genetic fuzzy systems hybridise the approximate reasoning method of fuzzy systems with the learning capabilities of neural networks and evolutionary algorithms. Despite these advances, research has shown that the original (Type-1) fuzzy sets are unable to model and minimise the effect of uncertainties even though its name has the connotation of uncertainty. Recently, Type-2 fuzzy sets and a concept known as the footprint of uncertainty have been introduced to overcome the shortcomings of classical Type-1 fuzzy sets. This project seeks to hybridise type-2 fuzzy systems with the learning capabilities of evolutionary algorithms. The objective is to investigate if type-2 fuzzy controllers evolved by genetic algorithms are more robust than its type-1 counterpart. |
|
| Fuzzy control of MEMS Gyroscope | |
| Koh Wei Kiat | |
|
Most MEMS gyroscopes are vibratory rate gyroscopes. The main mechanical component is a two degree-of-freedom vibrating structure, which is capable of oscillating in two directions on a plane. When the gyroscope is subjected to an angular velocity, the Coriolis effect transfers energy from one vibrating mode to another. The response of the second vibrating model provides information about the applied angular velocity. Ideally, the vibrating modes remain mechanically uncoupled. In practice, however, fabrication imperfections and environment variations are always present, resulting in a frequency of oscillation mismatch between the two vibrating. These imperfections degrade the gyroscope's performance and cause a false output. The project aims at developing an fuzzy control scheme for estimating the angular rate and, at the same time, identifies and compensates quadrature error. |
|
| Current Projects |
| |
| Click on poster for details |
|
|