DSP based rapid prototyping platform Project
The Project
"DSP based Rapid Prototyping Platform
for
Adaptive Network Controller"
Project Teams
Project Overview
Until recently, PC-based motion control was unpopular in the industry.
This was due to the inherent limitations of the PC bus speed as well as
the lack of floating point computational power required. The
project is to develop a plug-and-play motion control system
(solution oriented) which consists of a DSP based-motion controller card
and all necessary supporting software with a user-friendly GUI based on
PC platform for commercialization.
Project Objects
- TMS320C30 is chosen for wire-wrap prototyping
- Smooth transition to a mass product model
offers an easy upgrade path to TMS320C40 and higher performance models
and large shares in the maket.
- 1M <<...>> 32M of RAM is implemented
using zero-wait state static memory with battery backup.
- Two A/D converters multiplexed to give up to 8 channels and six
independent D/A of 16 bit resolution and among others.
Project Technical Issues
- Data acquisation
- System identification
- Control system simulation
- Choices of different control algorithms including PID
neural network, adaptive control or user defined control algorithms
Accomplishments
- Design of a PC-based motion controller card using a DSP for floating
point computations
- Overcome the low ISA bus data transfer rates and other inherent
limitations by performing all motion and servo computations on
the card itself
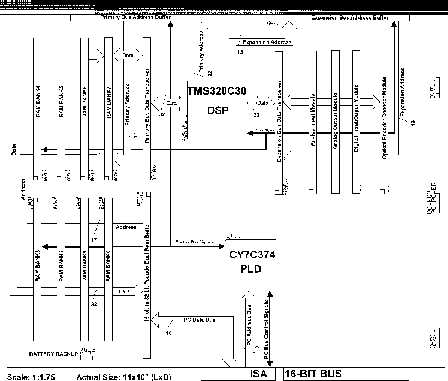
- The computational core was designed using the TMS320C30, a 32-bit
floating point DSP. This core is supported by 1Mx32 bit zero-wait state
ram, giving up to 4M words of storage
- The design features 4 multiplexable 16 bit A/D channels and 6
latchable 16 bit D/A channels
- Interfacing with industry standard optical encoders, the design also
features 64 digital inputs and 32 digital outputs.
 Return to the Home Page
Return to the Home Page