Galassia-2: A Student Developed CubeSat for Remote Sensing
Mission
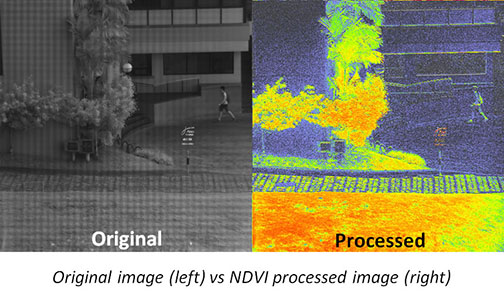
The primary mission of Galassia-2 is remote sensing such as agriculture and environmental change. To achieve this, the satellite will perform target pointing for image capturing and data transmission, and sun-pointing to optimize the power generation. The satellite carries a multi-spectral camera payload which has Green, Red, Red Edge and Near Infrared bands. The images in Red and Near Infrared bands can be used to compute Normalized Difference Vegetation Index (NDVI).
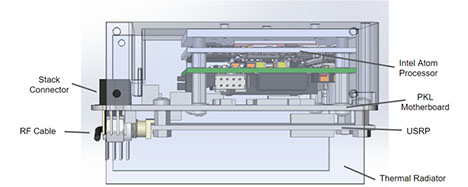
Payload Computer + S-Band Radio (PKL)
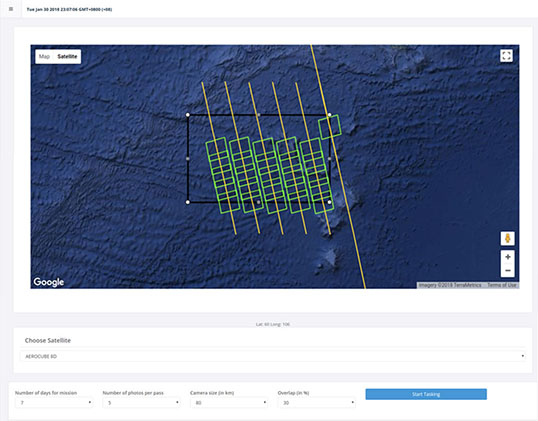
Mission Control and Tasking Software (MCTS)
MCTS is a web-based application that tracks, monitors, and controls Galassia-2. Using the satellite’s Two-Line Element and SGP4 Propagator, MCTS will be able to predict the location, position, and state of the satellite. A prominent feature of MCTS is the ability to plan missions for Galassia-2. The user can define the area to be photographed on the Google Map interface, and specify mission constraints, such as the number of days for a mission, number of photos to be taken per pass over area of interest, the image size, as well as the percentage overlap of the set of images. After processing these information, MCTS will inform the user of the feasibility of the mission and if feasible, it will generate a list of coordinates where each image would be taken. The image will then be geotagged and stitched onto Google Map for better visualization.