|
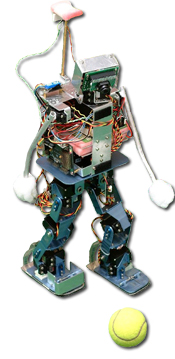
Manus - Humanoid
FIRA
World Champion (2003, 2005 and 2006)
Champion - Singapore Robotic Games (2004)
Dr.
Prahlad Vadakkepat
Legged locomotion
is a particularly intriguing challenge in robotics. Legged robots
have distinct advantages over their wheeled counterparts when
working in arbitrarily complex terrains: they can generally cross
obstacles more easily and exhibit greater adaptability. These
features are important in several applications such as exploration,
maintenance, intervention and service, all of which are beyond the
realm of traditional manufacturing robots. Bipeds are especially
interesting because humans are two-legged and places meant to be
occupied by humans (such as homes and offices) are designed for two
legged locomotion. If machines are to become more commonplace
phenomena in our lives (which clearly is the trend), the technology
of two-legged robotic locomotion in arbitrary environments must be
mastered thoroughly.
With a height of 46 cm and a weight of only 2 kg, the Manus is small
in size but it has a sophisticated overall mechanical structure.
Manus has 17 degrees of freedom (DOF); there are 17 joints powered
by motors which must be controlled simultaneously for the robot to
even stand up (if un-powered, the structure simply crumples into a
heap just like how a bicycle chain would). In order to realize a
natural gait, the joint design of the robot is modeled on the
structure of the human body, with each 6-DOF leg enabling the robot
to imitate most of the human walking motions. The robot senses its
environment through a combination of eight force sensors, one tilt
sensor, an IR sensor, a digital compass and a video camera. To
coordinate its sensory information and walking, the robot uses a
two-layered control system. The high-level control layer gathers and
processes the information from the sensors, decides on the necessary
walking motions and directions, and sends commands to the low-level
controller. The low-level control then processes inputs from the
tilt and force sensors, and realizes the walking motions and any
special motions such as kicking a ball.
Research Scholars:
Mr. Zhang Ruixiang (MEng), Mr. Dip Goswami (PhD) |